


Simplify, Scale, Save: The Case for 10BASE-T1S in Modern Vehicles
Introduction: The Network Under the Hood
Modern vehicles are no longer just mechanical marvels—they are data centers on wheels. With the rise of electric vehicles (EVs), advanced driver-assistance systems (ADAS), and connected infotainment, the volume and complexity of in-vehicle communication has exploded. Yet, much of this communication still relies on legacy protocols like CAN, LIN, and FlexRay.
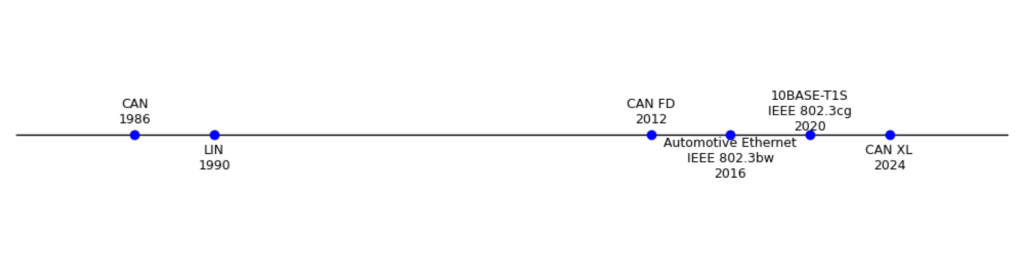
Evolution of Automotive Communication Protocols
These protocols were revolutionary in their time. But today, they are increasingly becoming bottlenecks—limiting scalability, increasing wiring complexity, and requiring costly gateways to bridge disparate domains.
Enter 10BASE-T1S: a new Ethernet standard designed to unify and simplify in-vehicle communication, especially for low-speed, high-volume applications.
The Legacy Landscape: LIN, CAN, FlexRay, and Their Evolutions
Automotive communication protocols have evolved over decades to meet the growing demands of safety, performance, and cost-efficiency. Here’s a breakdown of the most widely used legacy networks and their modern successors:
LIN (Local Interconnect Network)
- Bitrate: Up to 20 Kbps
- Topology: Single-master, multiple-slave bus
- Use Cases: Body electronics like window controls, seat adjustment, mirror positioning
- Strengths: Low cost, simple implementation
- Limitations: Very low bandwidth, no support for real-time or safety-critical applications
LIN is ideal for simple, non-critical functions. However, its limited speed and lack of scalability make it unsuitable for modern, data-intensive applications.
CAN (Controller Area Network)
- Bitrate: Up to 1 Mbps
- Topology: Multi-master bus
- Use Cases: Powertrain, chassis, battery management
- Strengths: Robust, real-time capable, widely adopted
- Limitations: Limited bandwidth, arbitration-based access can cause latency under load
CAN has been the workhorse of automotive networking, but its bandwidth ceiling is increasingly a bottleneck.
CAN FD (Flexible Data Rate)
- Bitrate: Up to 5–8 Mbps (data phase)
- Payload: Up to 64 bytes
- Improvement: Faster data phase, longer payloads
- Limitations: Still uses arbitration, not deterministic under high load
CAN FD extends CAN’s capabilities but doesn’t fundamentally change its architecture.
CAN XL
- Bitrate: Up to 20 Mbps (data phase)
- Payload: Up to 2048 bytes
- New Features: Virtual CAN IDs, SDU types, enhanced CRC
- Limitations: Still arbitration-based, not Ethernet-compatible
CAN XL is a significant leap forward but remains a proprietary evolution rather than a convergence with Ethernet.
FlexRay
- Bitrate: Up to 10 Mbps
- Topology: Bus or star
- Use Cases: Safety-critical systems like drive-by-wire, active suspension, adaptive cruise control
- Strengths: Deterministic timing, fault tolerance (dual channels)
- Limitations: High cost, complex implementation, limited scalability
FlexRay was designed for high-reliability applications but has seen limited adoption due to its cost and complexity.
Comparative Snapshot
| Protocol | Max Speed | Topology | Access Method | Use Cases | Cost |
|---|---|---|---|---|---|
| LIN | 20 Kbps | Single-master | Polling | Body electronics | $ |
| CAN | 1 Mbps | Multi-master | CSMA/CR | Powertrain, chassis | $$ |
| CAN FD | 5–8 Mbps | Multi-master | CSMA/CR | Diagnostics, software updates | $$ |
| CAN XL | 20 Mbps | Multi-master | CSMA/CR | High-speed control, zonal arch. | $$$ |
| FlexRay | 10 Mbps | Bus/Star | TDMA/FTDMA | Safety-critical systems | $$$ |
The Ethernet Alternative: 10BASE-T1S
What Is 10BASE-T1S?
10BASE-T1S is a physical layer Ethernet standard (IEEE 802.3cg) designed for low-speed, cost-sensitive applications. It enables multiple nodes to communicate over a single twisted pair cable using a shared bus topology.
Key Features:
- Bitrate: 10 Mbps (shared)
- Topology: Multi-drop bus (up to 8–255 nodes)
- Access Method: PLCA (Physical Layer Collision Avoidance)
- Cabling: Single unshielded twisted pair (UTP)
- Power: Supports Power over Data Lines (PoDL)
Why It Matters:
- Deterministic Communication: PLCA assigns time slots to each node, eliminating collisions and ensuring predictable latency.
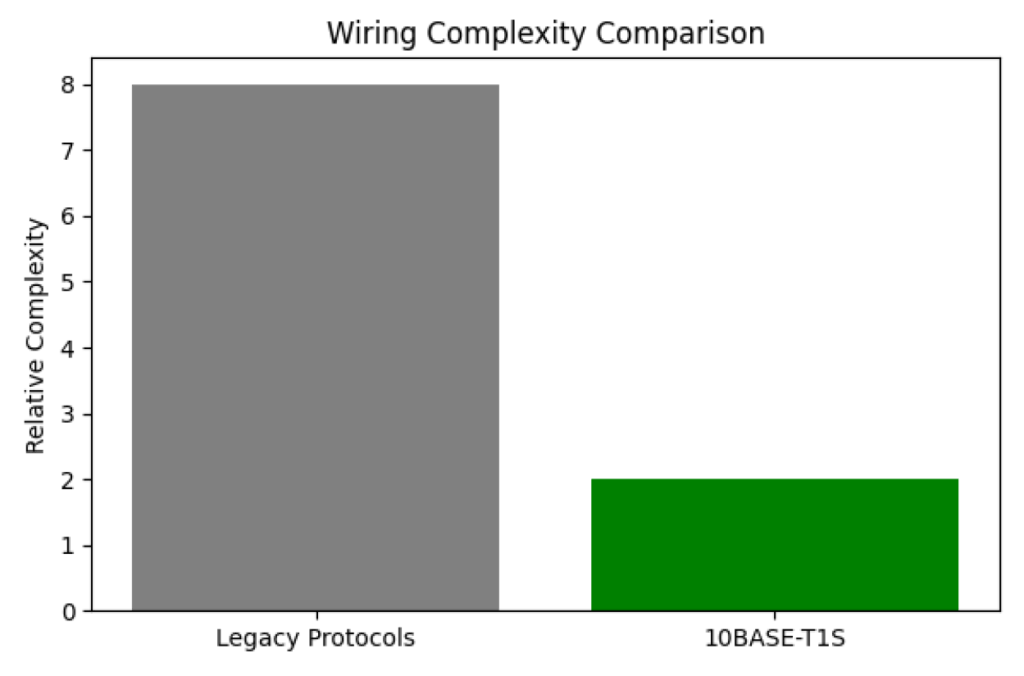
- Simplified Wiring: No switches required. Fewer PHYs. Less copper.
- Ethernet Interoperability: Natively compatible with standard Ethernet protocols and infrastructure, allowing seamless integration into mixed-speed networks (e.g.,100/1000BASE-T1) through bridges, gateways or switches.
- Scalability: Supports up to 255 nodes in a single segment.
- Cost Efficiency: Comparable to CAN and LIN, but with Ethernet benefits.
CAN XL vs. 10BASE-T1S: A Head-to-Head Comparison
| Feature | CAN XL | 10BASE-T1S |
|---|---|---|
| Max Bitrate | 20 Mbps (data phase) | 10 Mbps (shared) |
| Payload Size | Up to 2048 bytes | 46–1500 bytes |
| Bus Access | CSMA/CR (arbitration) | PLCA (deterministic) |
| Topology | Multi-master bus | Multi-drop bus |
| Addressing | Message ID / VCAN ID | MAC address / VLAN ID |
| CRC | PCRC + FCRC (HD=6) | 32-bit FCS (HD=4) |
| Virtual Network Support | Yes (VCAN ID) | Yes (VLAN ID) |
| Physical Layer Complexity | Moderate | Low |
| Ethernet Compatibility | No | Yes |
Verdict: While CAN XL offers higher peak speeds and advanced protocol features, 10BASE-T1S delivers a more deterministic, Ethernet-native solution that simplifies integration and wiring—especially for low-speed, high-density applications [1][2]
Real-World Use Cases for 10BASE-T1S
- Lighting Control: Replace LIN in interior lighting systems (dome lights, ambient lighting, indicators) with Ethernet to enable centralized control and diagnostics over a shared bus.
- Sensor Networks: Connect multiple low-bandwidth sensors (e.g., temperature, humidity, pressure, proximity) using a single twisted pair — no switch required.
- Low-Speed Actuator Control: Control actuators such as seat motors, HVAC flaps, or mirror adjustments with deterministic timing and simplified wiring.
- Peripheral Integration: Interface low-speed infotainment peripherals (e.g., touch controllers, basic audio modules, USB hubs for charging or control) within zonal architectures via a multi-drop Ethernet bus.
- Zonal Architecture Enabler: Consolidate multiple legacy buses (LIN, CAN, SPI, etc.) into an Ethernet-based backbone, facilitating OTA updates, diagnostics, and service-oriented communication.
Technica Engineering: Enabling the 10BASE-T1S Ecosystem
To help OEMs and Tier 1s adopt 10BASE-T1S, Technica Engineering offers two purpose-built tools:
Network Interfacer 10BASE-T1S
- Acts as a media converter and simulation tool.
- Supports PLCA configuration, burst mode, and traffic injection.
- Ideal for integration testing and network prototyping.

Capture Module 10BASE-T1S
- Logs up to 6x 10BASE-T1S buses with hardware timestamping.
- Detects beacons, empty cycles, and PLCA anomalies.
- Perfect for diagnostics, compliance, and validation.

Why Now?
- OEM Adoption: Already present in global OEM platforms.
- Standard Maturity: IEEE 802.3cg ratified and supported by major silicon vendors.
- Tooling Availability: Simulation and logging tools are ready for deployment.
- Scalability: Simulation and logging tools are ready for deployment.
Conclusion: The Road Ahead
As vehicles become more software-defined and data-driven, the need for a unified, scalable, and deterministic network becomes critical. While CAN XL and CAN FD will continue to serve specific use cases, 10BASE-T1S offers a compelling path forward—especially for low-speed, high-density domains.
It’s not just about replacing legacy protocols. It’s about building a network that’s ready for the next generation of mobility.
Ready to simplify your network?
Explore the 10BASE-T1S ecosystem at https://www.technica-engineering.com/10BASE-T1S